Connecting to a Controller and Performing Online Functions
This topic provides the following information:
Connecting to a controller in the redundant control system
Both controllers can be accessed via all virtual and physical IP addresses configured for the LAN ports. Access to the PRIMARY controller is done via the virtual IP addresses. To gather status information for the purpose of diagnostics of the redundant control system, access to the controllers (FIRST and SECOND controller) via the physical IP addresses is supported. The selection of the communication path is done in the appropriate drop-down menu in the controller Cockpit:
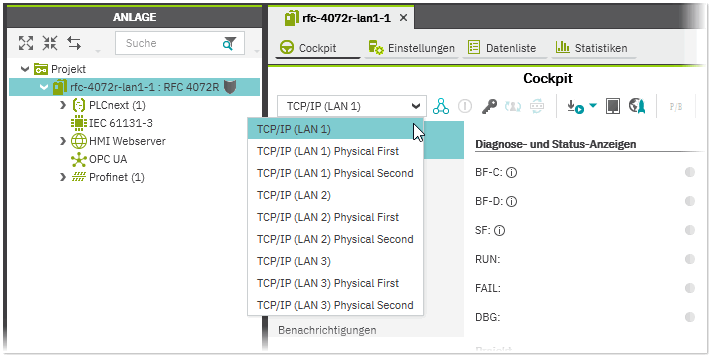
To access the PRIMARY controller, select 'TCP/IP (LAN1)'... 'TCP/IP (LAN3)' from the selection list. To directly access the port of the LAN interface of the FIRST or SECOND controller, select 'TCP/IP (LAN1) Physical First'... 'TCP/IP (LAN3) Physical Second'.
| Note
For communication with PLCnext Engineer, i.e., for downloading the project, applying online and debugging functions, always connect to the PRIMARY controller (virtual IP address). |
Controller diagnostics (status information and 'Notifications' log)
When connected to a specific controller via the virtual or physical IP addresses (see description above), specific status information and notifications on the controller are displayed under the categories in the controller Cockpit. Status information of the controller such as Health Status, Temperature, CPU Load etc. are shown in the 'Device' category. Information on the redundancy status of the controller, such as the redundancy type or redundancy role of the connected controller are provided in the 'Redundancy Status' category.
Messages such as Profinet alarms sent by the controller are logged in the 'Notifications' category. In case of a controller error, the log displays information on the redundancy role (PRIMARY/BACKUP) and redundancy type (FIRST/SECOND) of the controller that initially created the notification.
| Further Info
For further details on the controller diagnostics, see also the "Controller Diagnostics out of the Cockpit" topic. |
Running firmware services
Using the following buttons provided in the Cockpit toolbar, the following firmware services can be executed on both controllers:
| Button | Description |
|---|---|
 Execute warm start
Execute warm start | Executes a warm start of both controllers. After clicking the button, first the current controller status is determined to ensure that the controllers are in Stop state. If this is ensured, the controllers are (warm) started via a firmware service. |
 Stop
controller
Stop
controller | Stops both running controllers. After clicking the button, first the current controller status is determined to ensure that the controllers are in Running state. If this is ensured, the controllers are stopped via a firmware service. |
 Reset last error
Reset last error | Resets the redundancy error which was reported last for the particular controller. |
Switching the redundancy role
While connected to the controllers, the redundancy role of the controllers can be manually switched via the controller's Cockpit. Clicking the 'Switch redundancy role' button
 on the Cockpit toolbar performs a switch-over of the redundancy role of the controllers, i.e., the PRIMARY controller becomes the BACKUP controller and vice versa.
on the Cockpit toolbar performs a switch-over of the redundancy role of the controllers, i.e., the PRIMARY controller becomes the BACKUP controller and vice versa.
| Note
The 'Switch redundancy role' button is only active, if both controllers are reachable and in SYNC (work synchronously) or HSBY (Hot Standby) state. |
Information on the number of performed role switches since the last coldstart and the reason for the last role switch are shown in the 'Redundancy Status' category in the Cockpit (see the section "Controller diagnostics" above).