EtherCAT-Zustandsautomat
Der EtherCAT-Zustandsautomat verwaltet während des Kommunikationsaufbaus und im laufenden Betrieb die Kommunikationszustände zwischen dem Master und den Slave-Applikationen, wie im folgenden Bild gezeigt.
In jedem EtherCAT-Kommunikationsgerät ist ein Zustandsautomat implementiert. Darin ist für jeden Zustand festgelegt, welche Kommunikationsdienste über EtherCAT möglich, d.h. aktiv sind. Der Zustandsautomat jeder Slave-Station wird vom Zustandsautomaten des EtherCAT-Masters gesteuert. Das bedeutet, dass Zustandswechsel eines Slave normalerweise vom Master angefordert werden.
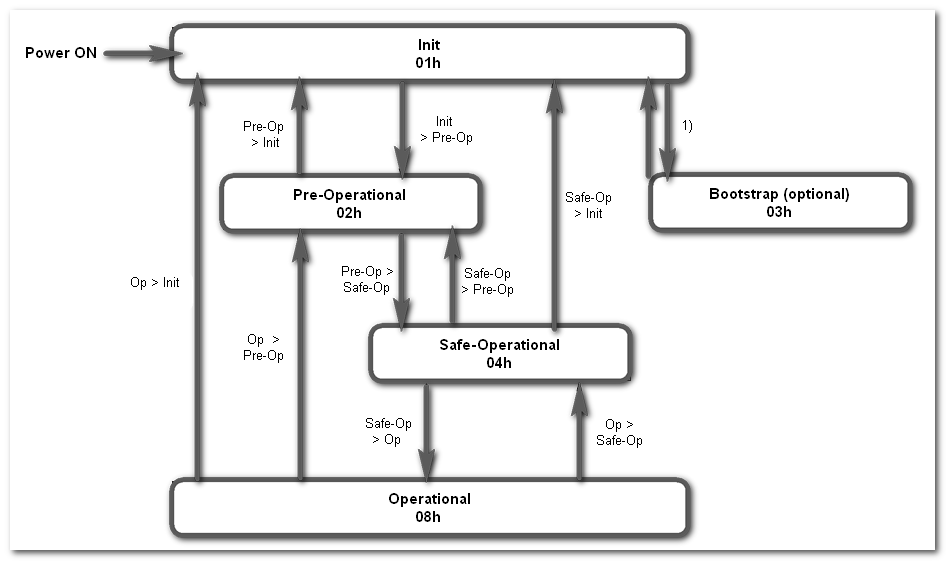
Hinweis 1): Der Zustand Bootstrap kann über die Tastenflächen im Bereich 'Zustand ändern' auf der Seite 'Allgemein' der 'Online-Funktionen' erreicht und verlassen werden.
In den folgenden Beschreibungen der Zustände werden auch EtherCAT-Kommunikationsprotokolle erwähnt, die aktuell in PLCnext Technology noch nicht unterstützt werden.
Hinweis
In den EtherCAT-Online-Funktionen finden sich Tastenflächen, mit denen sich Zustandswechsel des Masters und der angeschlossenen Slaves anfordern lassen. |
| Zustand/Übergang | Beschreibung |
| Init - 01h | Nach dem Einschalten befinden sich EtherCAT-Geräte im Init-Zustand.
In diesem Zustand ist weder Mailbox- noch Prozessdaten-Kommunikation möglich. |
| Init > Pre-Op | Der EtherCAT-Master ...
- initialisiert die SyncManager-Kanäle 0 und 1 für Mailbox-Kommunikation. (Siehe Hintergrundinformation unten.)
- setzt die DL-Adressen und das AL-Kontrollregister.
- initialisiert die DC-Synchronisierung.
- fordert den Zustand Pre-Operational an.
Die Slaves prüfen, ob die Mailbox korrekt initialisiert wurde.
 Hintergrundinformationen: SyncManager Hintergrundinformationen: SyncManager
Der SyncManager sorgt für den konsistenten Datenaustausch zwischen dem EtherCAT-Master und den Slaves. Er liest Empfangsdaten (RX) aus dem EtherCAT-Frame oder bindet Sendedaten (TX) in den Frame ein. Indem der gleichzeitige Zugriff durch Master und Slave auf denselben Datenbereich verhindert wird, kann ein Datenbereich nicht während des Lesens überschrieben werden. Es sind 4 SyncManager definiert:
- Kanal 0 - RX SDO: Servicedatenobjekte werden aus dem EtherCAT-Frame in die Mailbox übertragen.
- Kanal 1 - TX SDO: Servicedatenobjekte werden aus der Mailbox in den EtherCAT-Frame übertragen.
- Kanal 2 - RX PDO: Prozessdatenobjekte werden aus dem EtherCAT-Frame gelesen.
- Kanal 3 - TX PDO: Prozessdatenobjekte werden in den EtherCAT-Frame geschrieben.
|
Pre-Operational
(Pre-Op) - 02h |
- Es ist keine Prozessdaten-Kommunikation möglich.
- Mailbox-Kommunikation ist möglich
- Es werden die Einstellungen für die Prozessdatenübertragung sowie modulspezifische Parameter übertragen, die von den Standardeinstellungen abweichen.
|
| Pre-Op > Safe-Op | Der EtherCAT-Master ...
- baut die SyncManager-Kanäle und die FMMU-Kanäle für Prozessdaten auf.FMMU steht für Fieldbus Memory Management Units. Diese mappen logische Adressen auf physikalische Adressen des EtherCAT Slave Controllers.
- stellt mit Hilfe von SDOs die PDO-Mappings und die PDO-Zuweisungsparameter des SyncManagers her.
- fordert den Zustand Safe-Operational an.
Jeder EtherCAT-Slave...
- prüft, ob die SyncManager-Kanäle für die Prozessdaten-Kommunikation korrekt sind. Bevor er den Zustandswechsel quittiert, kopiert der EtherCAT-Slave aktuelle Eingangsdaten in die entsprechenden DP-RAM-Bereiche des EtherCAT Slave Controllers.
- prüft, ob die Verteilter Taktgeber (DC)-Einstellungen korrekt sind (falls erforderlich).
|
Safe-Operational
(Safe-Op) - 04h |
- Mailbox-Kommunikation ist möglich.
- Prozessdaten-Kommunikation ist möglich. Es werden zwar Eingangsdaten zyklisch gelesen/aktualisiert, jedoch sind die Ausgänge deaktiviert (Ausgangsdaten sind ungültig).
|
| Safe-Op > Op |
- Der Master sendet gültige Ausgangsdaten.
- Der Master fordert den Zustand Operational an.
|
Operational
(Op) - 08h |
- Mailbox-Kommunikation ist möglich.
- Prozessdaten-Kommunikation ist möglich.
- Die Eingangsdaten werden zyklisch aktualisiert und der EtherCAT-Master übermittelt Ausgangsdaten an die EtherCAT-Slaves.
- Der EtherCAT-Slave kopiert die Ausgangsdaten des Masters auf seine Ausgänge und liefert Eingangsdaten an den EtherCAT-Master zurück.
|
Bootstrap - optional
(Boot) - 03h | Dieser Zustand kann nur aus dem Zustand Init erreicht und auch nur nach Init verlassen werden, indem Sie auf der Seite 'Allgemein' der 'Online-Funktionen' die entsprechende Taste 'Zustand ändern' klicken.
Im Zustand Bootstrap lässt sich über den EtherCAT-Master ein Firmware-Update auf einem EtherCAT-Slave ausführen.
- Es ist nur Mailbox-Kommunikation über das Protokoll File-Access over EtherCAT (FoE) möglich.
Um eine Datei zu übertragen, steht Ihnen im Editor 'Online-Funktionen' die zur Verfügung.
- Andere Mailbox-Kommunikation und Prozessdaten-Kommunikation sind deaktiviert.
|